Celebrating the journey with our December A&S grads
December graduates walk the stage this month, so we sat down for a talk with three A&S grads who’ve taken different pathways through Cornell.
 Department Homepage
The College of Arts & Sciences
Department Homepage
The College of Arts & Sciences

We support interdisciplinary connections and resources across the physical and social sciences, encouraging students and faculty to pursue research that spans many departments. Cognitive Science studies the fundamental workings of cognition and the mind. It investigates perception, action, language, knowledge, development, and thinking from multiple perspectives—theoretical, experimental, and computational.
Cognitive Science prepares students for graduate studies or work in areas that require a combination of technical skills, scientific reasoning, social and psychological sophistication, and excellent writing and speaking skills.
Received the Lifetime Achievement Award to honor and individual who has made long-lasting and distinguished theoretical and empirical contributions to basic research in experimental psychology, awarded by the Society for Experimental Psychology and Cognitive Science.
Was awarded a new grant as principal investigator from the National Science Foundation (NSF) and National Institute of Standards and Technology, titled “The Science of Substantial Similarity in AI-related Copyright Violations: Advancing Trustworthy AI.”
Was interviewed on the American Psychological Association (APA) podcast, “Speaking of Psychology”. Episode 348: “Teens, AI, and the science of risky decisions” which went live on September 24.
December graduates walk the stage this month, so we sat down for a talk with three A&S grads who’ve taken different pathways through Cornell.
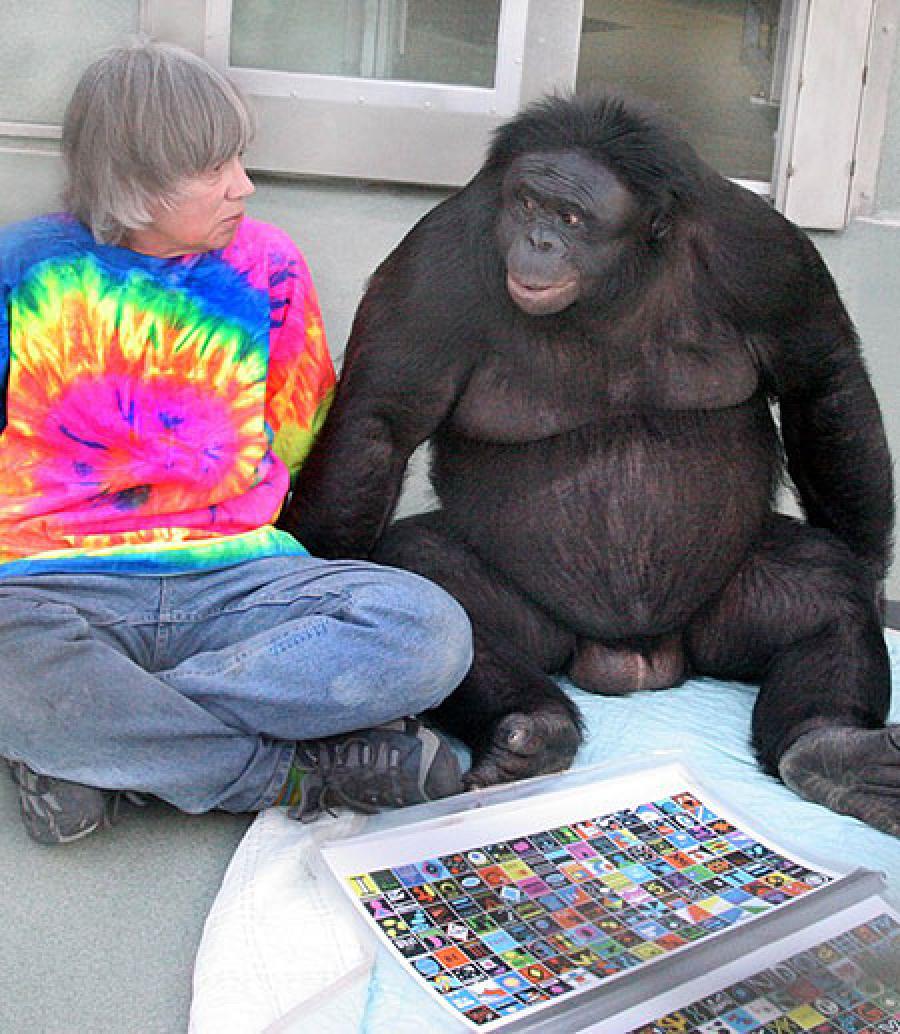
Kanzi's legacy and the relation between great apes and language will be explored in a Humanities Lab Workshop on April 19.
In his new book, “Humanities in the Time of AI,” professor Laurent Dubreuil argues that the arrival of AI may present an opportunity to “re-create scholarship.”

Our minds and the ways we tell stories are closely attuned, research shows, and scholar Fritz Breithaupt will explore how that connection works during a March visit as University Lecturer.


Coming from the University of Toronto, where he was the director of the Munk School of Global Affairs and Public Policy, Loewen began his five-year appointment as the Harold Tanner Dean of the College of Arts and Sciences Aug. 1.

Women Leaders of Color at Cornell aims to increase representation of women of color in leadership positions across professions.

This summer, 101 students in the College of Arts and Sciences will take part in groundbreaking research on campus with 61 faculty as part of the Nexus Scholars Program.

Read the newest Cog Sci Supers comic to follow the adventures of Phil, Ling, Sy, Nero, and Pasqual, Cog Sci's superheroes who each represent an area of study under the umbrella of Cognitive Science.
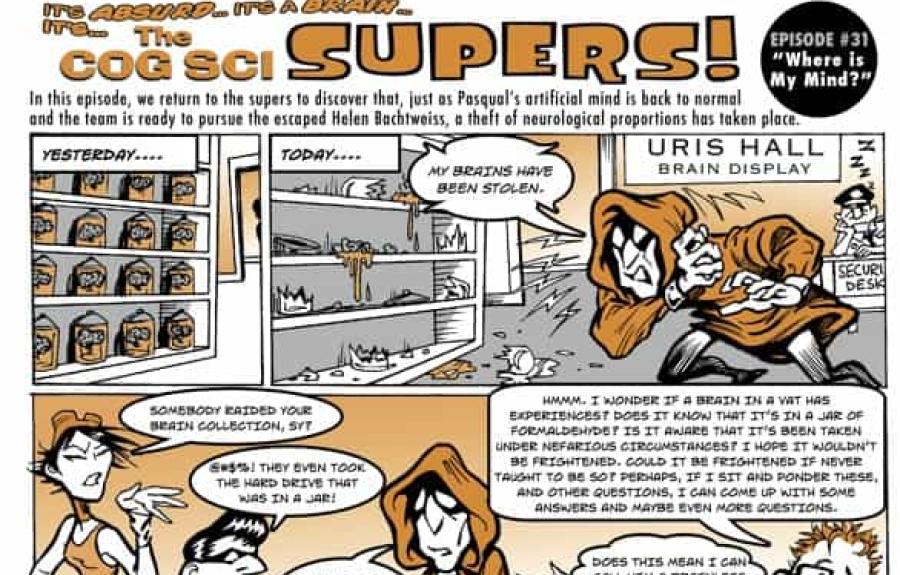
Check out more comics featuring the Cog Sci Supers.
If you need an accessible copy, please email cogst@cornell.edu and we’ll do our best to get you one!